
Г. Челябинск Свердловский проспект 35
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов"РобоПаук ИН ПРО". Полный комплект на Raspberry Pi
(1) |
Наличие: много
385 000 руб. / шт.
До конца акции осталось:
00дн.
00час.
00мин.
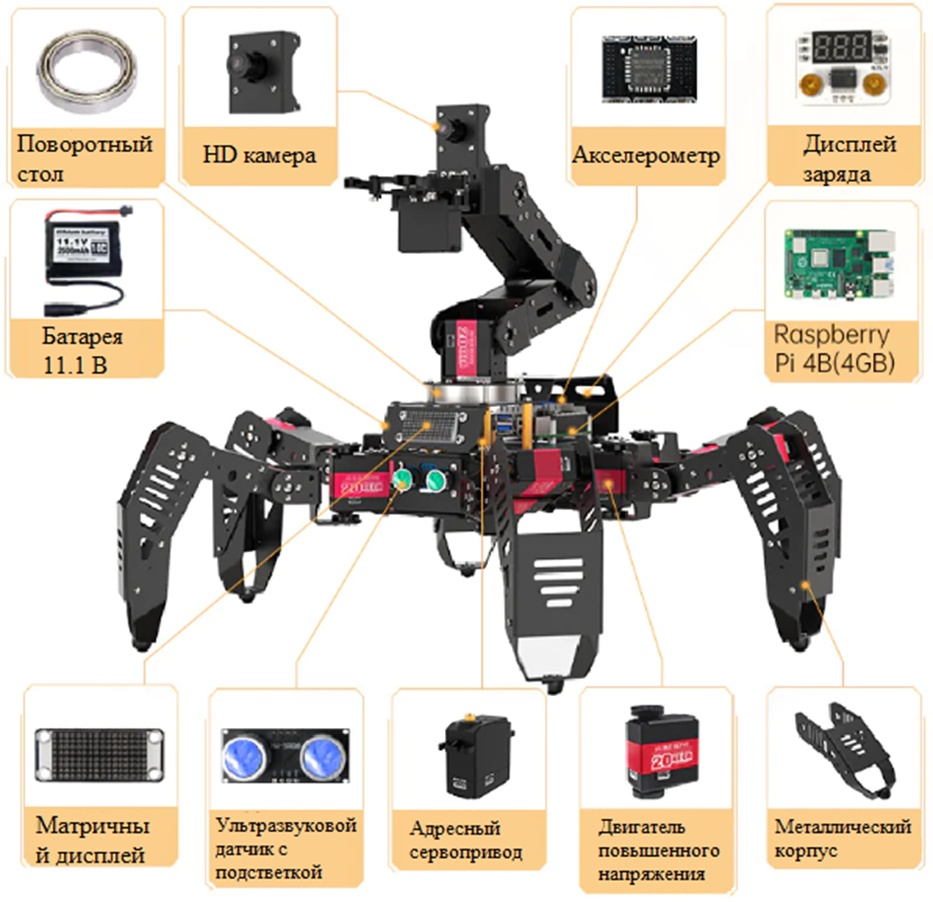
Конструктор для изучения многокомпонентных робототехнических систем и манипуляционных роботов. Предназначен для углубленного изучения программирования. В комплект входит манипулятор с 6 степенями свободы, который позволяет захватывать и перемещать объекты весом до 450г
Полное описание
| Артикул | HW2019192 |
| Бренд | Техник |
Поделиться


Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов"РобоПаук ИН ПРО". Полный комплект на Raspberry Pi
(1) |
Наличие: много
385 000 руб.
Весь товар сертифицирован
Подарки постоянным покупателям
Выгодные акции и спецпредложения
Сборка заказа 3 рабочих дня
Общие сведения:
Конструктор для изучения многокомпонентных робототехнических систем и манипуляционных роботов. Предназначен для углубленного изучения программирования. Программирование возможно на языках C++, Python, Java, Java Script и др. В комплект входит плата RaspberryPi 4B с 4 ГБ ОЗУ или эквивалент. Система технического зрения с возможностью применения алгоритмов машинного обучения и настройки параметров нейросетей. Система технического зрения должна обеспечивать функционал распознавания различных геометрических объектов по набору признаков, распознавания графических маркеров, распознавания массивов линий и элементов дорожных знаков и разметки.В комплект входит манипулятор с 6 степенями свободы, который позволяет захватывать и перемещать объекты весом до 450г
Возможности набора:
- Объектно-ориентированный подход в программировании;
- Возможность углубленно изучать машинное зрение и машинное обучение,
- Возможно программирование на Python, HTML 5, JavaScript, JQuery, Java, C, C ++, Perl и Erlang.
- Благодаря своей конструкции с шестью ногами, гексаподы обладают высокой устойчивостью.
- Шестиногие роботы имеют большую гибкость и маневренность по сравнению с роботами с меньшим количеством ног. Они способны выполнять сложные движения, повороты и изменения траектории. захват и перенос объектов.
- Качественное исполнение деталей для сборки;
- Возможность программировать с компьютера, ноутбука, телефона
- Возможность удаленного управления через интернет
Уровни обучения:
Исследовательский уровень: Знакомство со сложной кинематикой, основы тригонометрии, углубленное изучение текстовых языков программирования, изучение физических основ работы датчиков (Расчет траектории движения, массивы данных)
Продвинутый уровень: Изучить алгоритмы поиска пути: A*, Dijkstra, RRT, PRM, Развитие навыков планирования движения: локальное и глобальное планирование, планирование траекторий. Распознавания графических маркеров, распознавание массивов линий и элементов дорожных знаков и разметки.
Составные части:
| Артикул | HW2019192 |
| Бренд | Техник |
�� ��������� ����������� ������� ��������� � ������ �������� �������� ������� �� ������ ��������, ����� ���� ������� �������� ����������� �������� �� ���������� ����.
�������� �� ������
�������� (��-��). ������ �������� ����� � ���� ������ � 18 �� 21.00 (��� �������, ��� ����� ����������� �� 18.00), ���� ������� ���������� ��� (���� ����� ����������� ����� 18.00).
�����������
�� ������ ������� ���������� �� ����� ����� � ����� ���� � ������� ��� �����. ���� ������ � ���������� ������� �������� ����� ������ �����. ��������������� ����� ����� ���������� ��� � ������� ���� ������� ����.
Запросить консультацию о товаре
Хит продаж
Мы рекомендуем
 арт. 1122311")
(13) |
46 500 руб.
Хит продаж
Мы рекомендуем

(6) |
39 900 руб.
Мы рекомендуем
 арт.4567812")
(25) |
108 800 руб.

Хит продаж
Мы рекомендуем

(9) |
67 500 руб.

")

 арт. mot1")



Новинка
Распродажа
Хит продаж

(15) |
12 280 руб.
Хит продаж
Мы рекомендуем
 арт. 1122312")
(4) |
46 500 руб.
Хит продаж

(4) |
34 360 руб.





Рекомендуем приобрести
 Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов "РобоПаук ИН". Продвинутый комплект на Raspberry Pi 269 500 руб.
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов "РобоПаук ИН". Продвинутый комплект на Raspberry Pi 269 500 руб.  Универсальный комплект датчиков ко всей линейки конструкторов Техник 34 500 руб.
Универсальный комплект датчиков ко всей линейки конструкторов Техник 34 500 руб.  Робототехнический набор для изучения многокомпонентных робототехнических систем. Расширенный комплект "РобоПаук базовый" на Arduino 247 000 руб.
Робототехнический набор для изучения многокомпонентных робототехнических систем. Расширенный комплект "РобоПаук базовый" на Arduino 247 000 руб. ") Образовательный набор для изучения технологий машинного зрения, построения и настройки нейросетей и проектирования беспилотников "Робопес" (Базовая версия 4Gb) 272 500 руб.
Образовательный набор для изучения технологий машинного зрения, построения и настройки нейросетей и проектирования беспилотников "Робопес" (Базовая версия 4Gb) 272 500 руб. ") Ресурсный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов "РобоПаук ИН" (HW2019177) 115 500 руб.
Ресурсный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов "РобоПаук ИН" (HW2019177) 115 500 руб.